
ROS(AIC算法应用赛备赛笔记)
相关资料
官方 ROS 培训课程(莫问大讲堂):https://space.bilibili.com/3493143676717925?spm_id_from=333.788.upinfo.head.click
ROS 资料文档:http://www.autolabor.com.cn/book/ROSTutorials
Ubuntu 安装及配置
安装文档:https://blog.csdn.net/LYLv_/article/details/143107112?spm=1001.2014.3001.5506
环境配置:https://www.bilibili.com/video/BV1yCWTzzEhd?spm_id_from=333.788.videopod.sections&vd_source=822e86b53dab98632ef279a46d2536db
⚠️ 无法复制粘贴问题

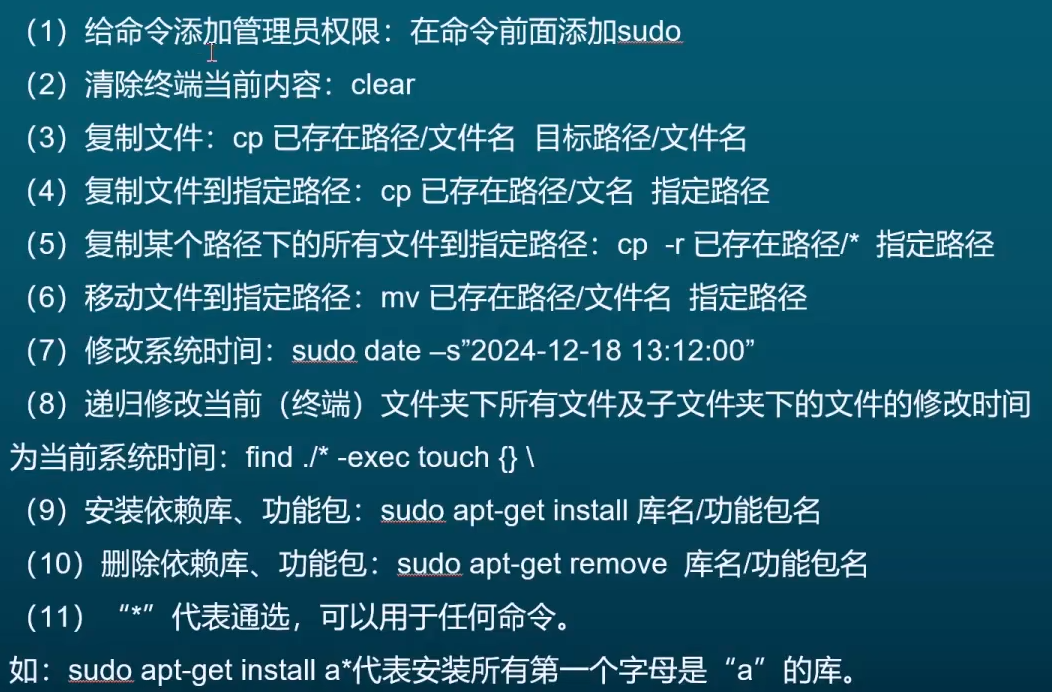
Ubuntu 常用命令
(1)ls :列出当前目录下的所有文件和目录(默认在主目录的路径下)
(2)pwd :查看当前目录的绝对路径
(3)cd :进入指定目录
(4)cd .. :返回上一级目录
(5)mkdir :创建目录
可以使用 mkdir 1 / 2 创建多级目录,前提是 1 目录已存在
(6)touch :创建文件,需要指定文件后缀名(可以在指定目录创建文件)
(7)gedit :创建文件的同时打开文件
(8)rm :删除文件
(8)rm -rf :删除目录
(9)rm -r :删除目录及目录下的所有文件
(10)sudo chmod 777 文件名:赋予文件可执行权限
检验是否修改成功:执行命令后,使用 ls 命令查看文件,看赋予权限后的文件名是否是绿色的
(11)./ 文件名:执行文件
python 案例
(1)准备工作
默认处于主目录下
bash
mkdir code # 创建目录
cd code # 进入目录
gedit hello.py # 创建文件并打开文件
chmod 777 hello.py # 赋予文件可执行权限(2)编写代码
首先需要在文件头添加 python 解释器,之后再编写命令
python
#!/usr/bin/python3
print("hello world")(3)运行代码
bash
./hello.py # 方式一
python3 hello.py # 方式二ROS 文件系统架构
基本介绍
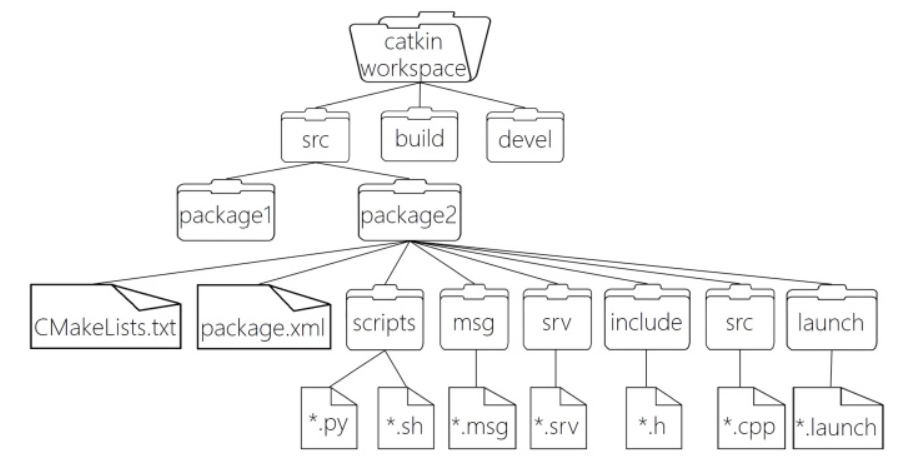
WorkSpace --- 自定义的工作空间
|--- build:编译空间,用于存放CMake和catkin的缓存信息、配置信息和其他中间文件。
|--- devel:开发空间,用于存放编译后生成的目标文件,包括头文件、动态&静态链接库、可执行文件等。
|--- src: 源码
|-- package:功能包(ROS基本单元)包含多个节点、库与配置文件,包名所有字母小写,只能由字母、数字与下划线组成
|-- CMakeLists.txt 配置编译规则,比如源文件、依赖项、目标文件
|-- package.xml 包信息,比如:包名、版本、作者、依赖项...(以前版本是 manifest.xml)
|-- scripts 存储python文件
|-- src 存储C++源文件
|-- include 头文件
|-- msg 消息通信格式文件
|-- srv 服务通信格式文件
|-- action 动作格式文件
|-- launch 可一次性运行多个节点
|-- config 配置信息
|-- CMakeLists.txt: 编译的基本配置构建文件架构
bash
# 默认再主目录下
mkdir catkin_ws # 创建工作空间
cd catkin_ws # 进入工作空间
mkdir src # 创建源码目录
cd src # 进入源码目录
catkin_create_pkg package rospy roscpp std_msgs # 创建功能包,package为包名,可以替换成其他的
mkdir scripts # 创建scripts目录,用于存放 python 文件python 案例
bash
cd scripts # 进入 scripts 目录
gedit hello.py # 创建并打开 hello.py 文件编写如下代码并保存
python
#! /usr/bin/env python3
import rospy
if __name__ == "__main__":
rospy.init_node("Hello") # 初始化节点
rospy.loginfo("Hello World!!!!") # 输出信息赋予文件权限
bash
chmod 777 hello.py # 赋予文件可执行权限运行文件
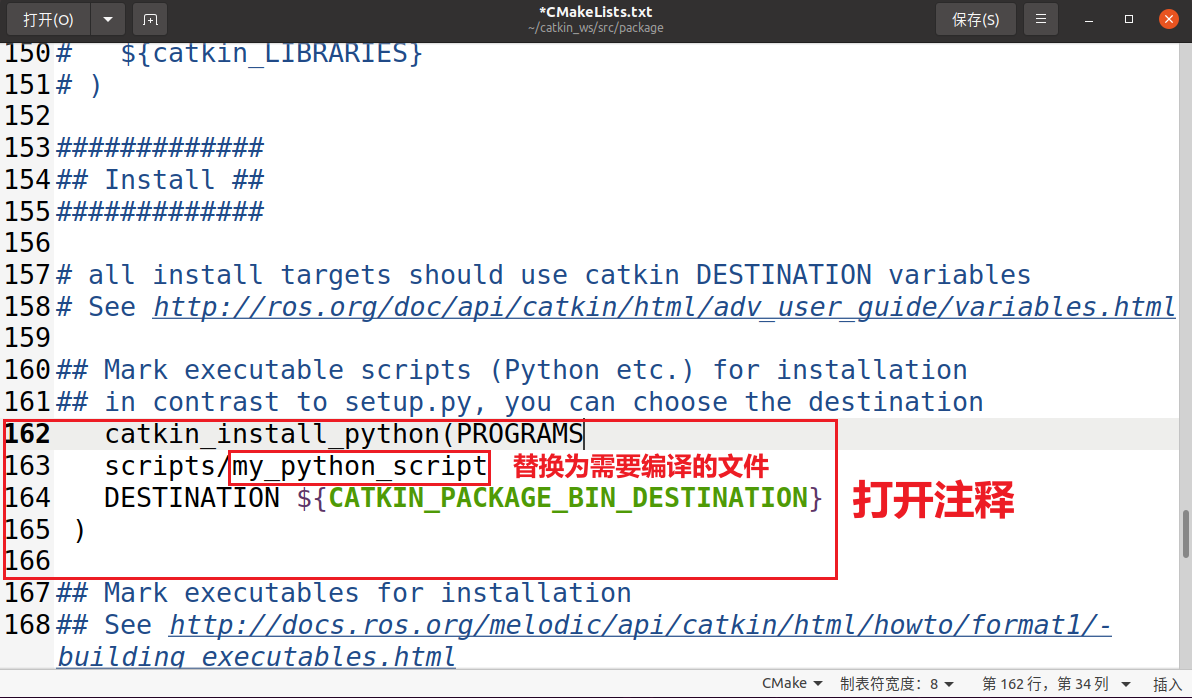
(1)编译文件,打开 CMakeLists.txt 文件,找到 162 - 165 行,打开注释,添加需要编译的文件
进入第二层(src)进行编译,执行如下命令
bash
cd ~ # 返回主目录
cd catkin_ws # 进入第二层
catkin_make # 编译(2)运行文件
修改终端配置文件,回到主目录,点击 ctrl + h 打开隐藏文件,打开 .bashrc 文件

配置完成后关闭所有终端,新开启终端才会是配置生效,执行如下命令运行 python 文件
bash
roscore # 单开一个终端运行,表示开启主节点
rosrun package hello.py # 新开一个终端,package 为功能包名,hello.py 为文件名,二者均可替换成其他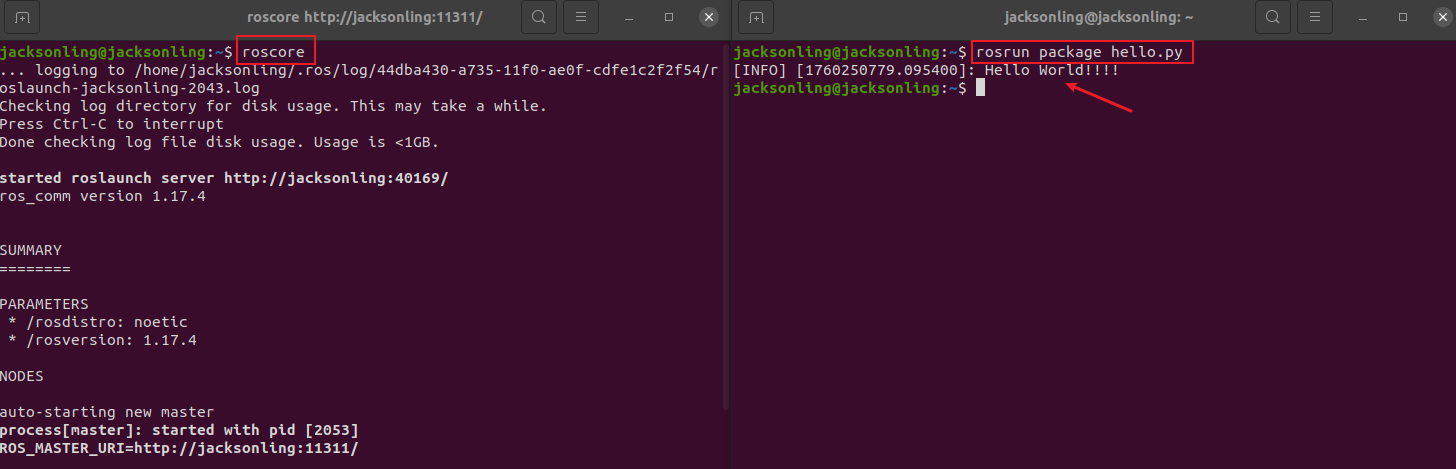
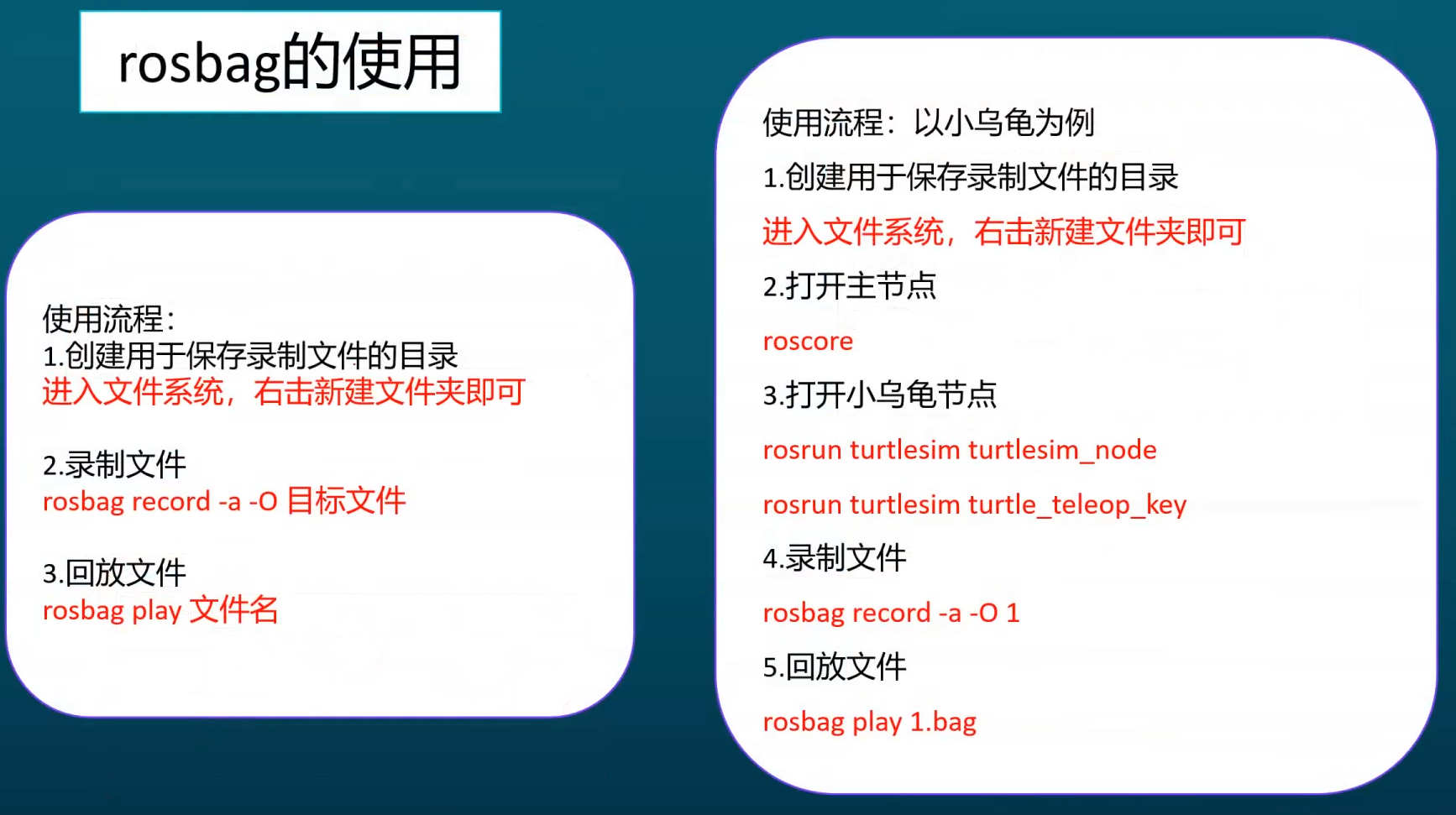
roscore 与节点
小乌龟移动案例
bash
roscore # 开启主节点
rosrun turtlesim turtlesim_node # 开启小乌龟节点
rosrun turtlesim turtle_teleop_key # 键盘控制小乌龟移动节点常用命令
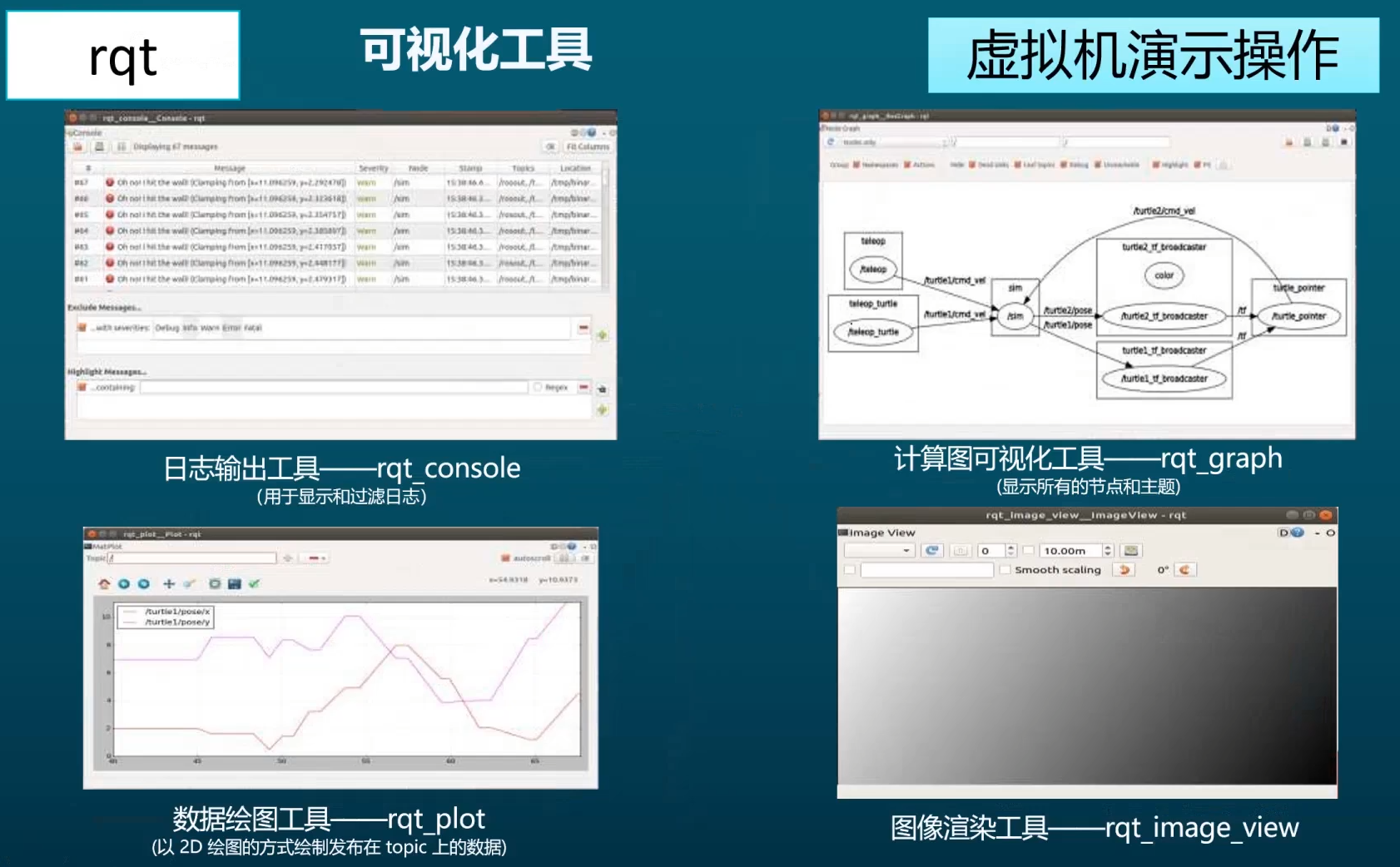
可视化节点关系图
bash
rqt_graph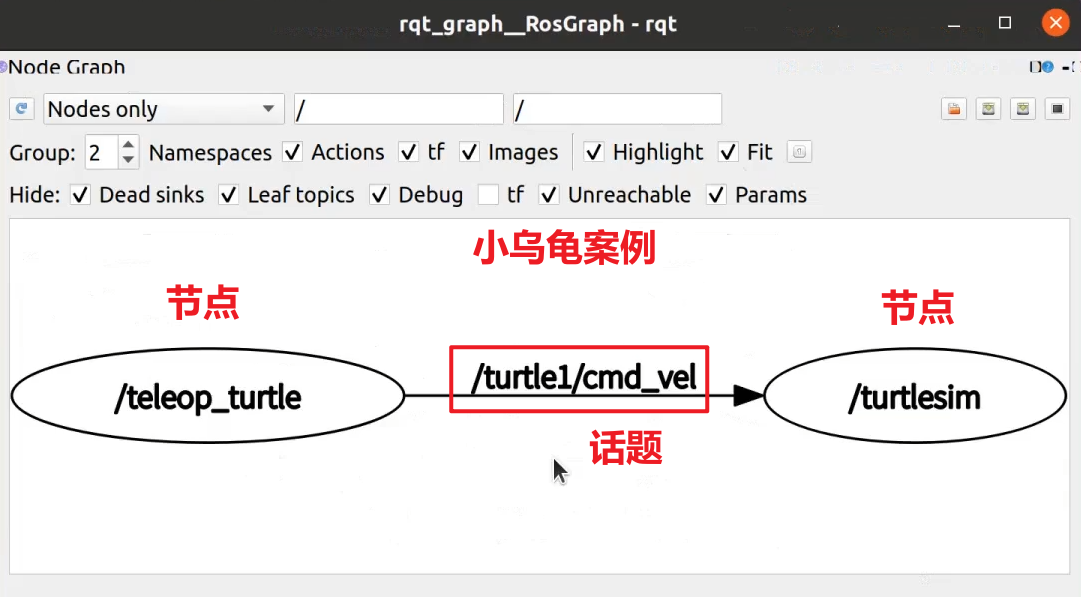
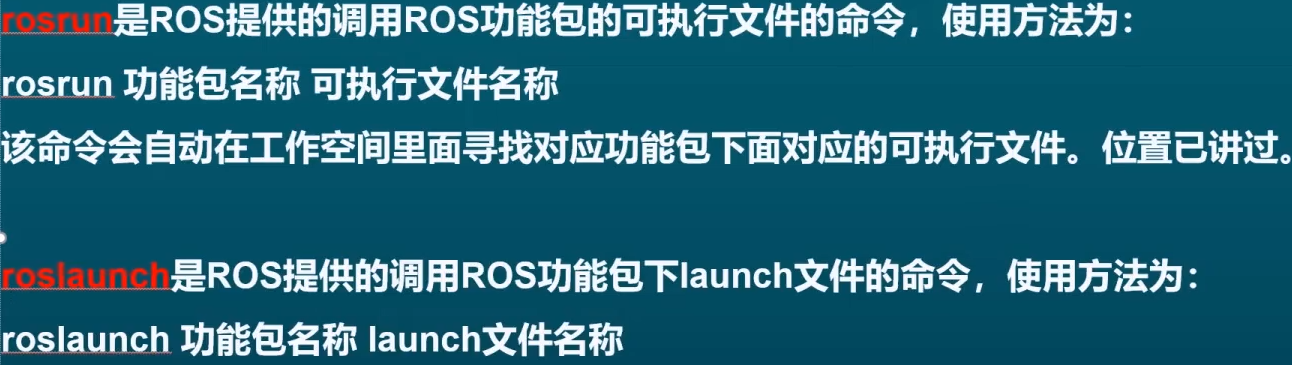
区别两个执行命令
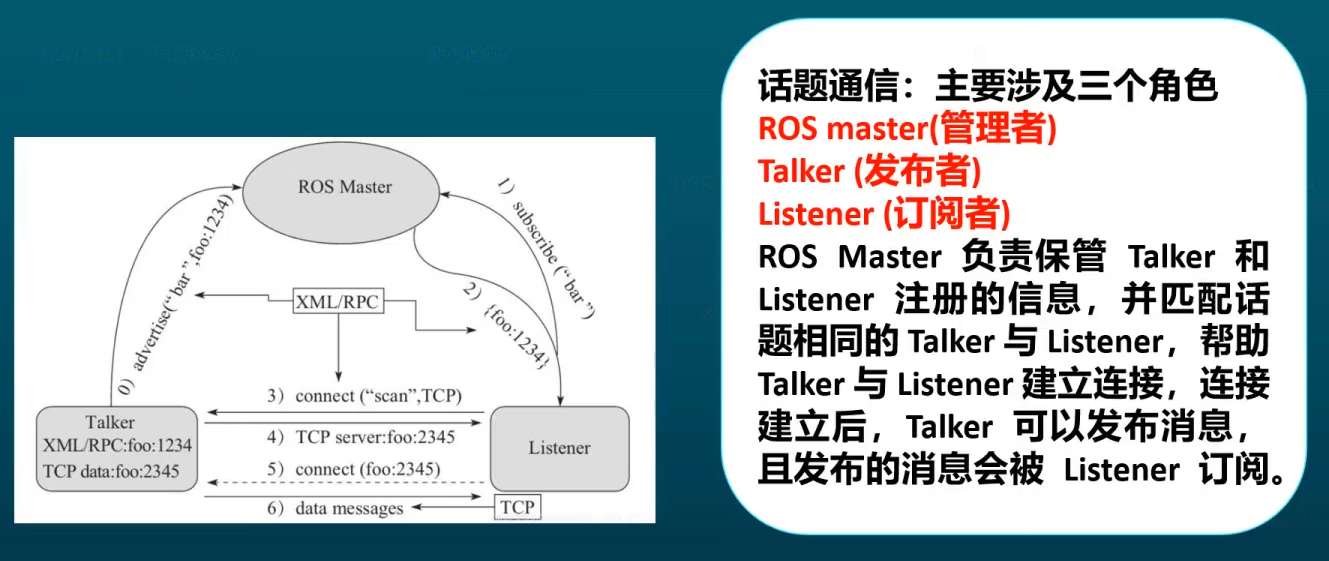
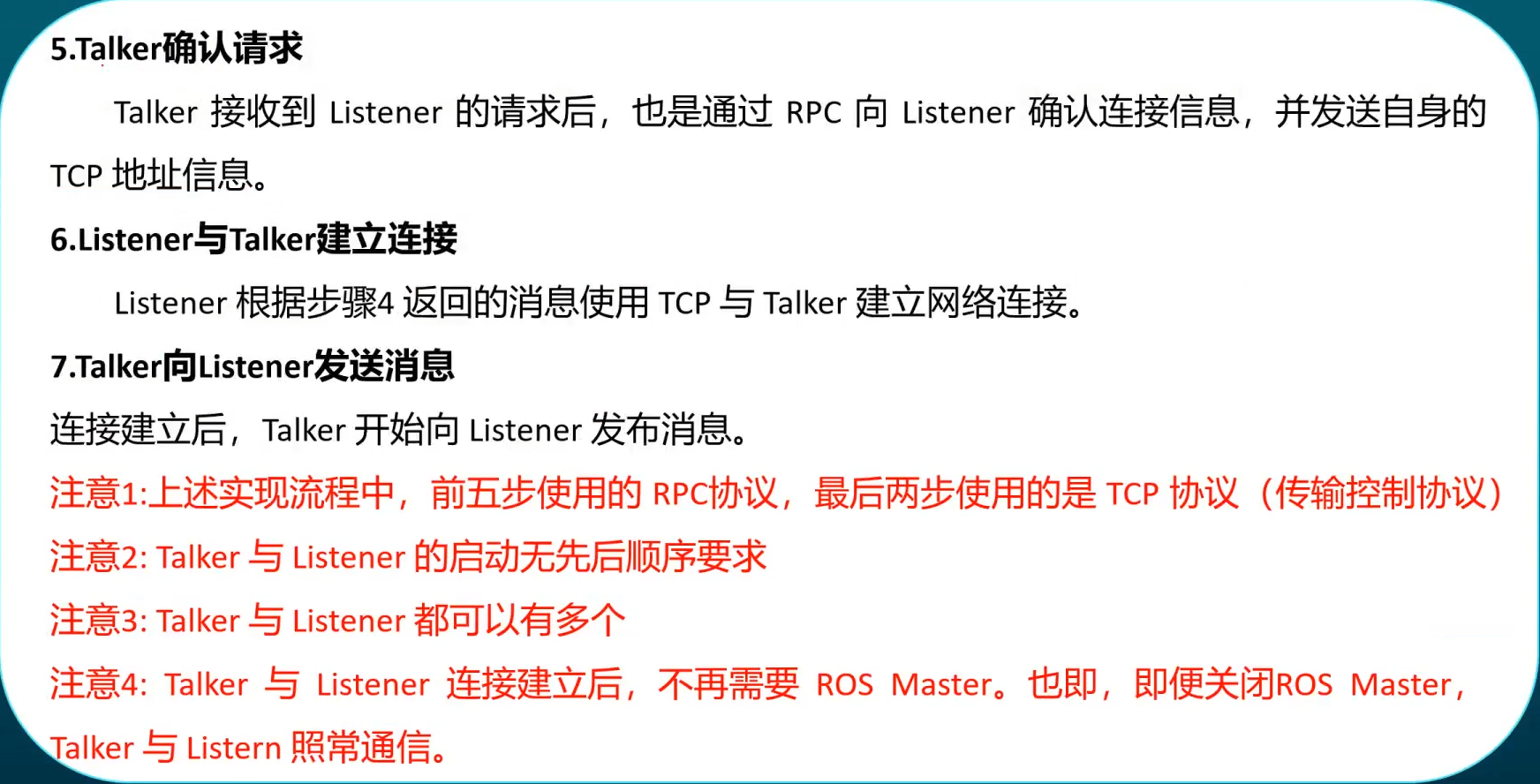
话题通信
基本介绍


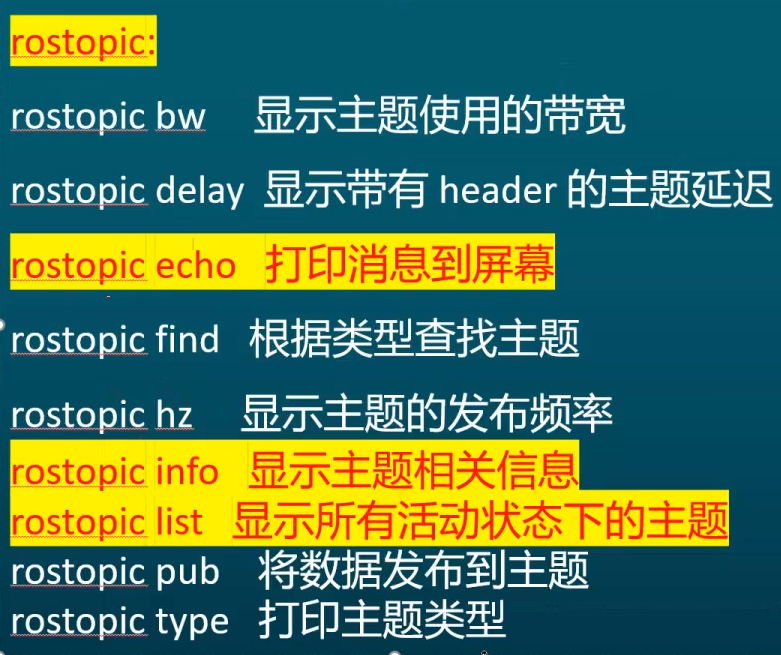
常用命令
应用案例
参考文档:http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/22hua-ti-tong-xin/213-hua-ti-tong-xin-zhi-python-shi-xian.html
(1)进入 scripts 目录,创建两个文件
bash
touch pub.py # 发布者
touch sub.py # 订阅者(2)pub.py
py
#! /usr/bin/env python3
#1.导包
import rospy
from std_msgs.msg import String
if __name__ == "__main__":
#2.初始化 ROS 节点:命名(唯一)
rospy.init_node("talker_p")
#3.实例化 发布者 对象
pub = rospy.Publisher("chatter",String,queue_size=10)
#4.组织被发布的数据,并编写逻辑发布数据
msg = String() #创建 msg 对象
msg_front = "hello 你好"
count = 0 #计数器
# 设置循环频率
rate = rospy.Rate(1)
while not rospy.is_shutdown():
#拼接字符串
msg.data = msg_front + str(count)
pub.publish(msg)
rate.sleep()
rospy.loginfo("写出的数据:%s",msg.data)
count += 1(3)sub.py
py
#! /usr/bin/env python3
#1.导包
import rospy
from std_msgs.msg import String
def doMsg(msg):
rospy.loginfo("I heard:%s",msg.data)
if __name__ == "__main__":
#2.初始化 ROS 节点:命名(唯一)
rospy.init_node("listener_p")
#3.实例化 订阅者 对象
sub = rospy.Subscriber("chatter",String,doMsg,queue_size=10)
#4.处理订阅的消息(回调函数)
#5.设置循环调用回调函数
rospy.spin()(4)赋予文件可执行权限
bash
chmod 777 pub.py
chmod 777 sub.py(5)配置 CMakeLists.txt 文件
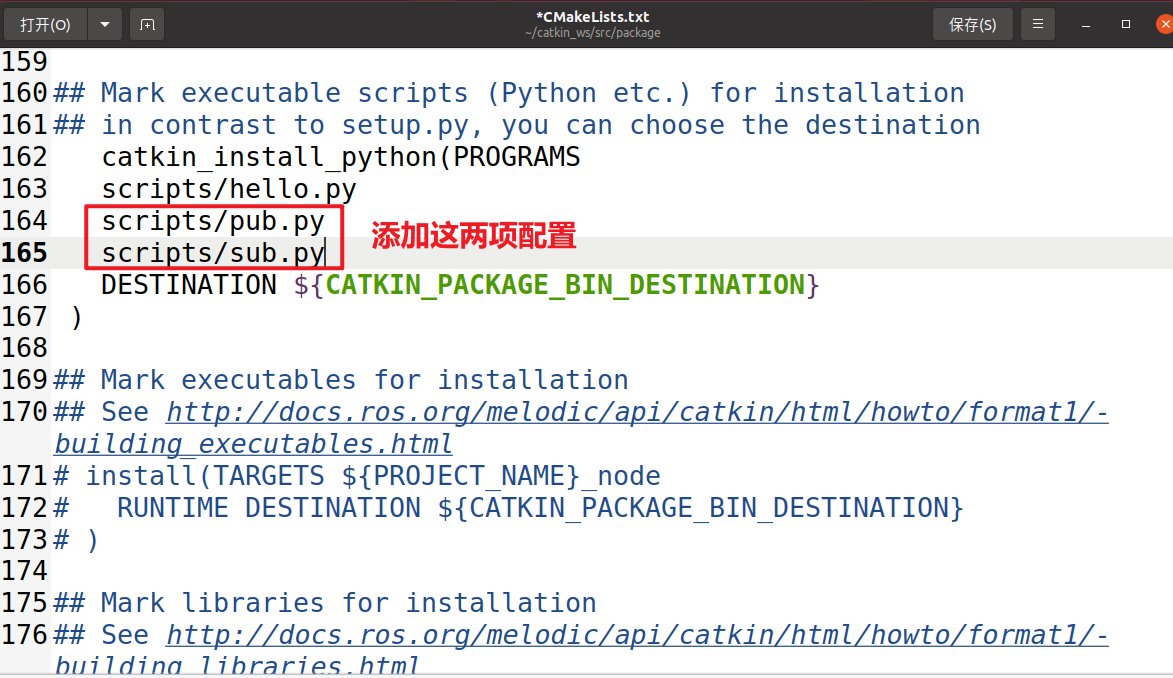
(6)进入第二层,执行编译命令
bash
cd ~ # 退回主目录
cd catkin_ws # 进入第二层
catkin_make # 编译(7)运行文件
bash
roscore # 开启主节点
# package 为功能包名,可替换成其他
rosrun package pub.py
rosrun package sub.py(8)运行结果如下
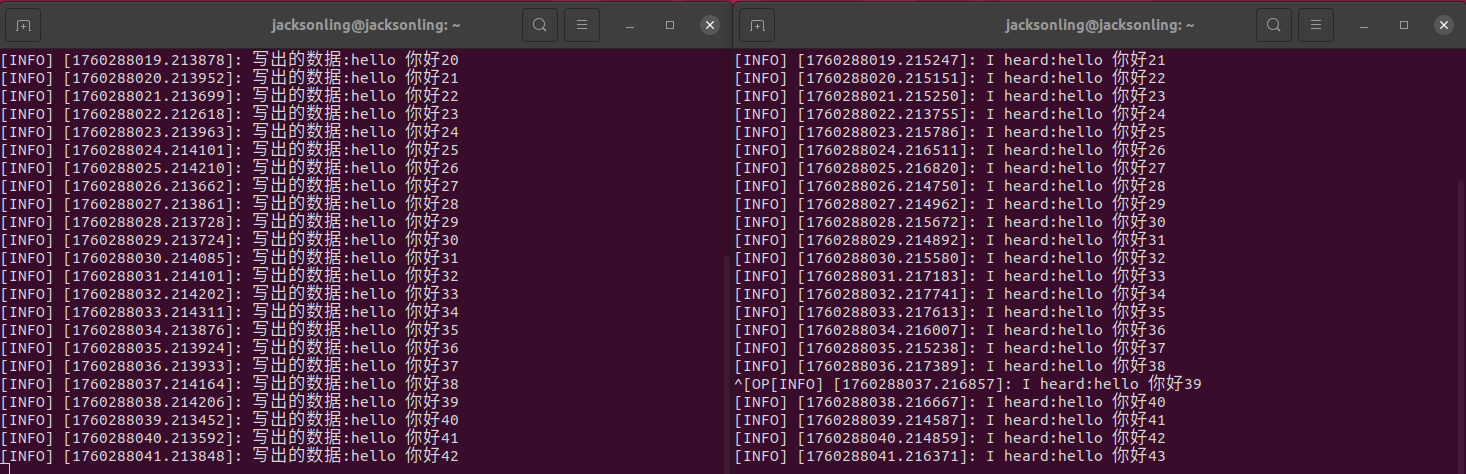
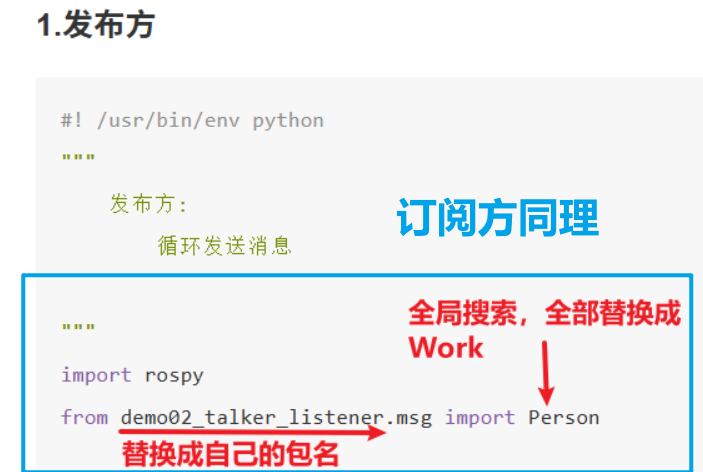
自定义 msg
(1)基本配置:http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/22hua-ti-tong-xin/214-hua-ti-tong-xin-zhi-zi-ding-yi-xiao-xi.html
(2)python 案例:http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/22hua-ti-tong-xin/216-hua-ti-tong-xin-zhi-python-diao-yong-zi-ding-yi-xiao-xi.html
(3)注意:新建 msg 文件命名为 Work.msg
执行命令
bash
catekin_make # 进入第二层执行编译命令
roscore # 开启主节点
rosrun package pub2.py # package 为功能包名,替换为自己的
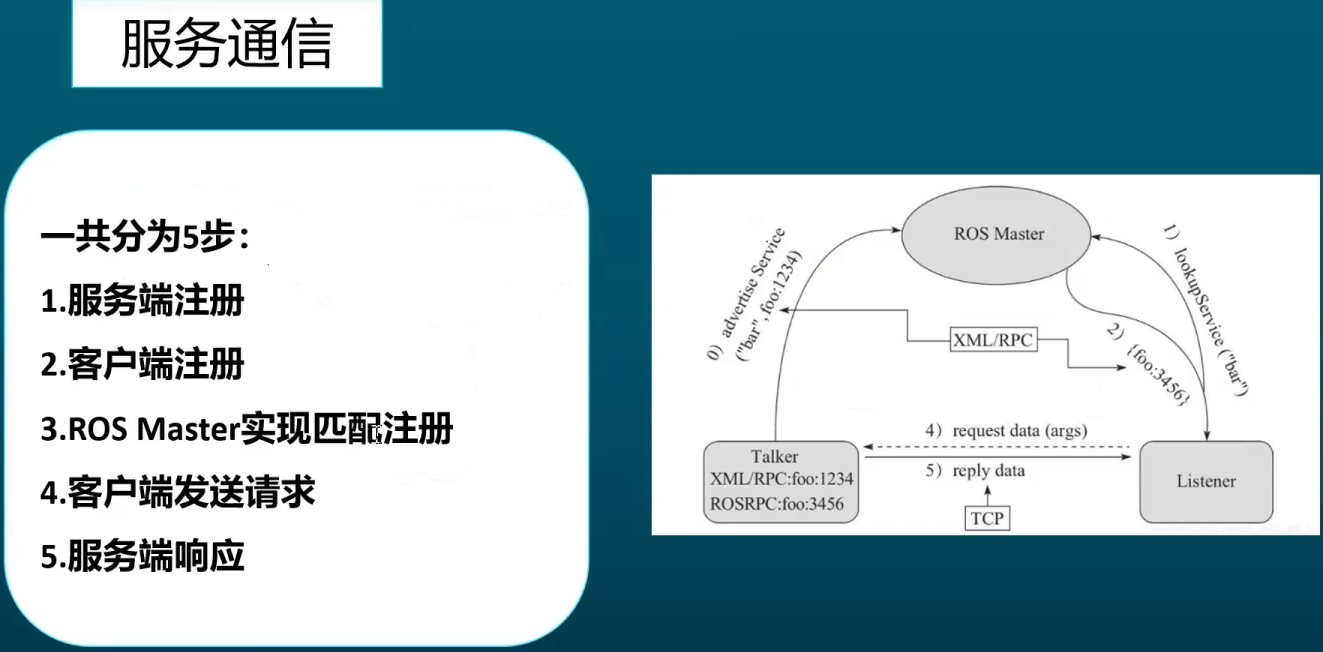
rosrun package sub2.py服务通信
基本介绍

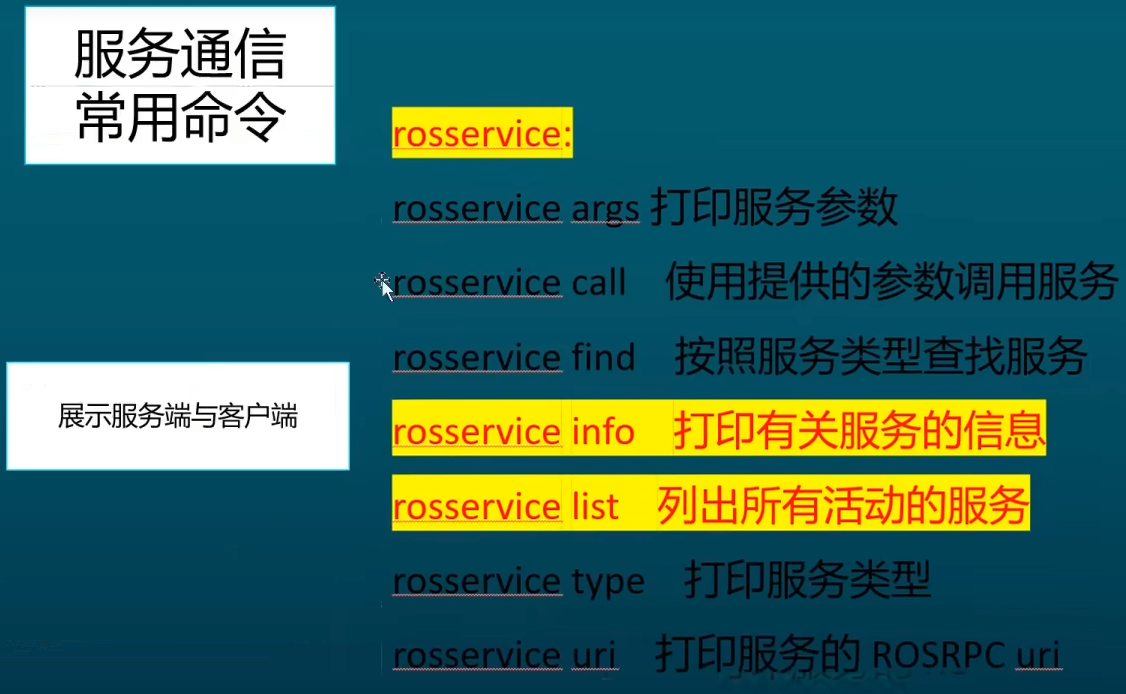
常用命令
应用案例
bash
roscore # 开启主节点
rosrun turtlesim turtlesim_node # 启动小乌龟
rosnode list # 查看小乌龟节点
rosnode info /turtlesim # 查看小乌龟节点信息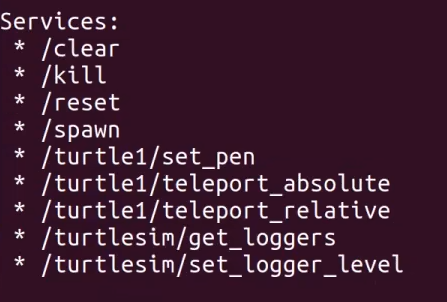
调用服务,以生成小乌龟的服务 spawn 为例
bash
rosservice call /spawn # 输入命令后按两下 tab 键,输入小乌龟生成位置的参数
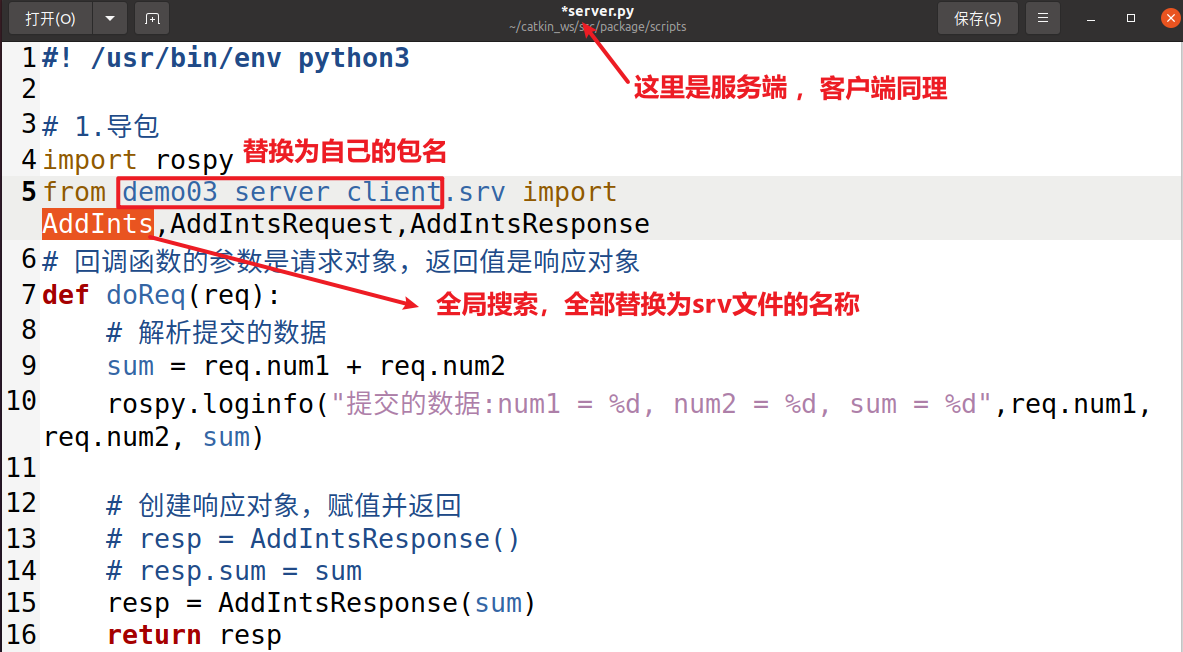
自定义 srv
(1)基本配置:http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/23-fu-wu-tong-xin/222-fu-wu-tong-xin-zi-ding-yi-srv.html
(2)python 案例:http://www.autolabor.com.cn/book/ROSTutorials/di-2-zhang-ros-jia-gou-she-ji/23-fu-wu-tong-xin/224-fu-wu-tong-xin-zi-ding-yi-srv-diao-yong-b-python.html
(3)新建 Test.srv 文件
执行命令
bash
roscore # 开启主节点
rosrun package server.py # package 为功能包名,替换为自己的
rosservice list # 查看服务列表
rosservice call /Test # 调用服务,在命令后传入两个参数,返回的是两参数之和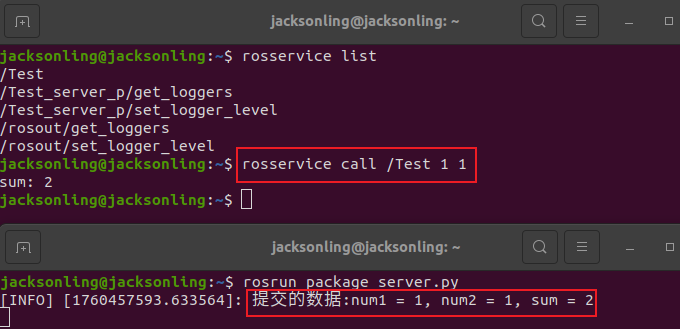
客户端测试
bash
rosrun package client.py # package 为功能包名,替换为自己的,命令后跟两个参数,返回的是两参数之和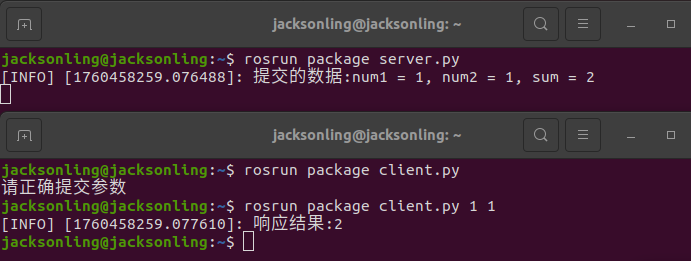
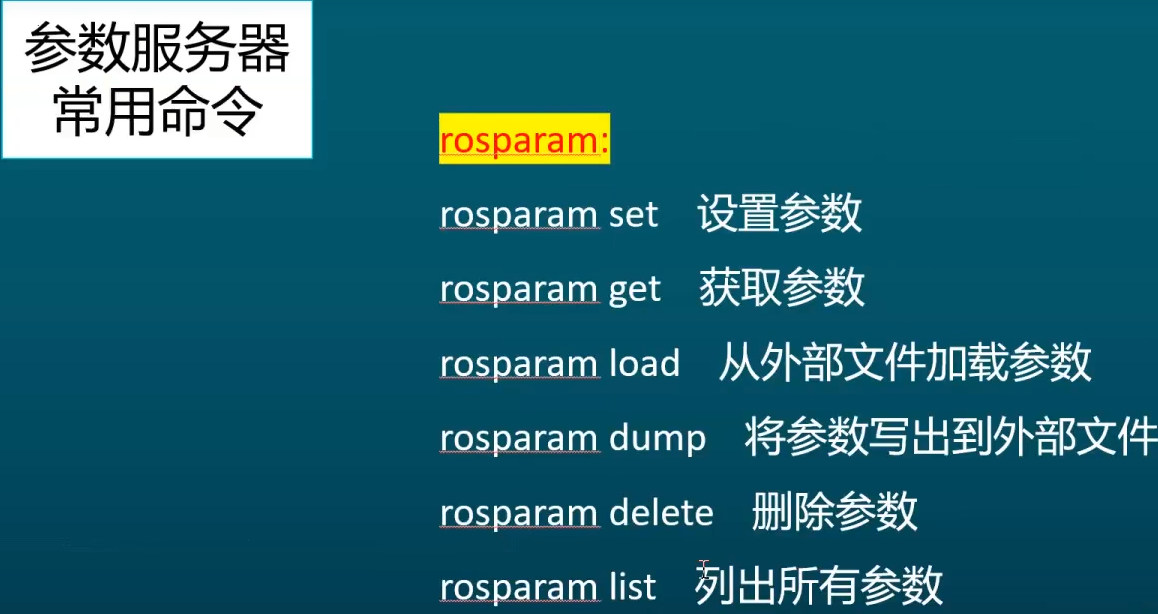
参数通信
基本介绍

应用案例
bash
roscore # 开启主节点
rosrun turtlesim turtlesim_node # 启动小乌龟
rosparam list # 查看参数列表
rosparam get /turtlesim/background_r # 获取背景红色值
rosparam set /turtlesim/background_r 255 # 设置背景红色值为 255
# 重启小乌龟,即可看到背景颜色改变
rosrun turtlesim turtlesim_node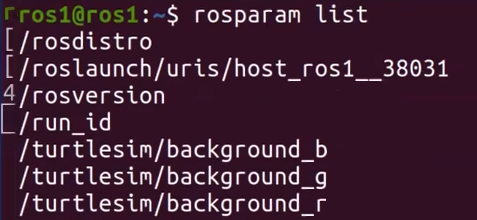

ROS 常用工具
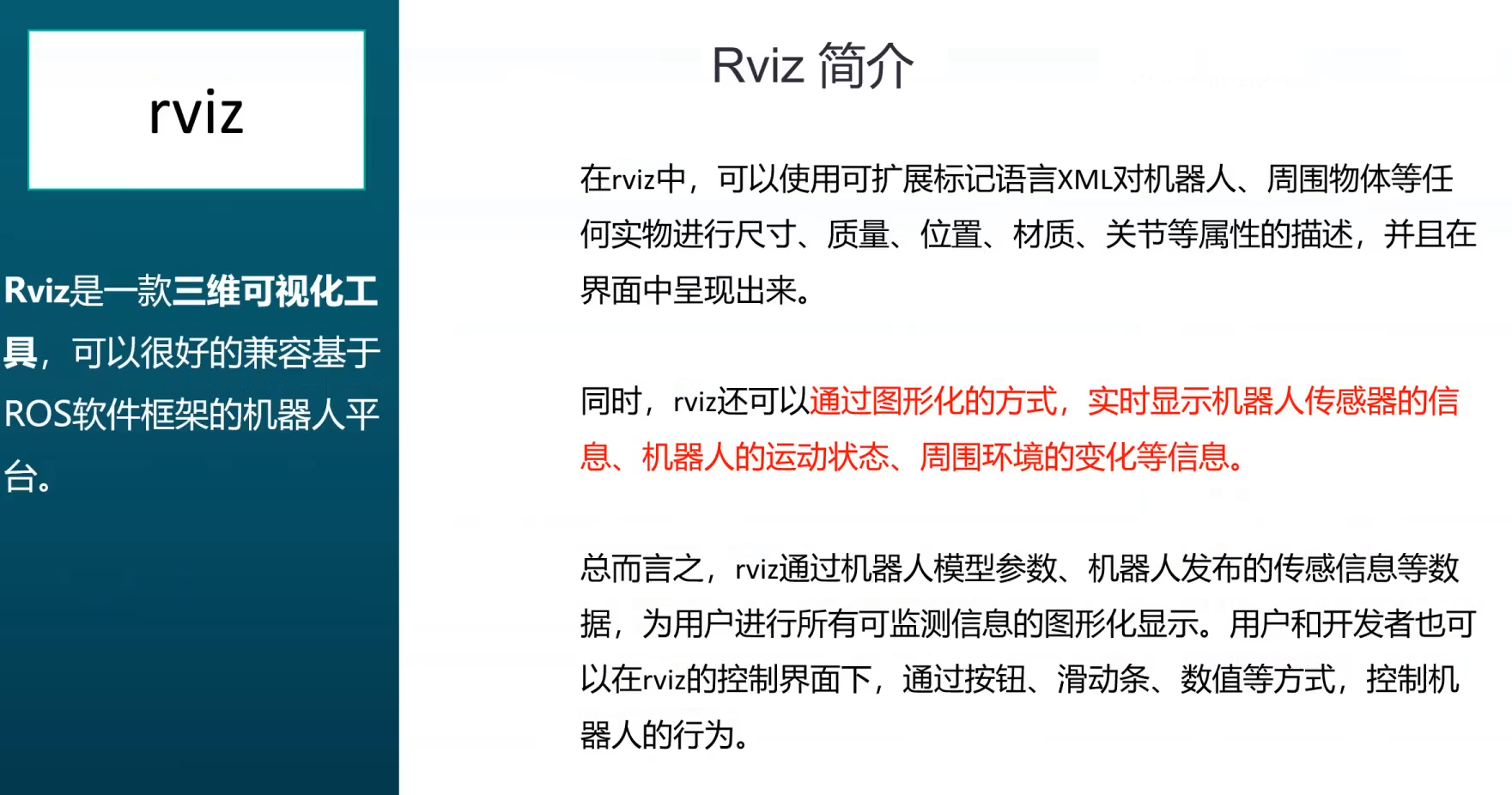
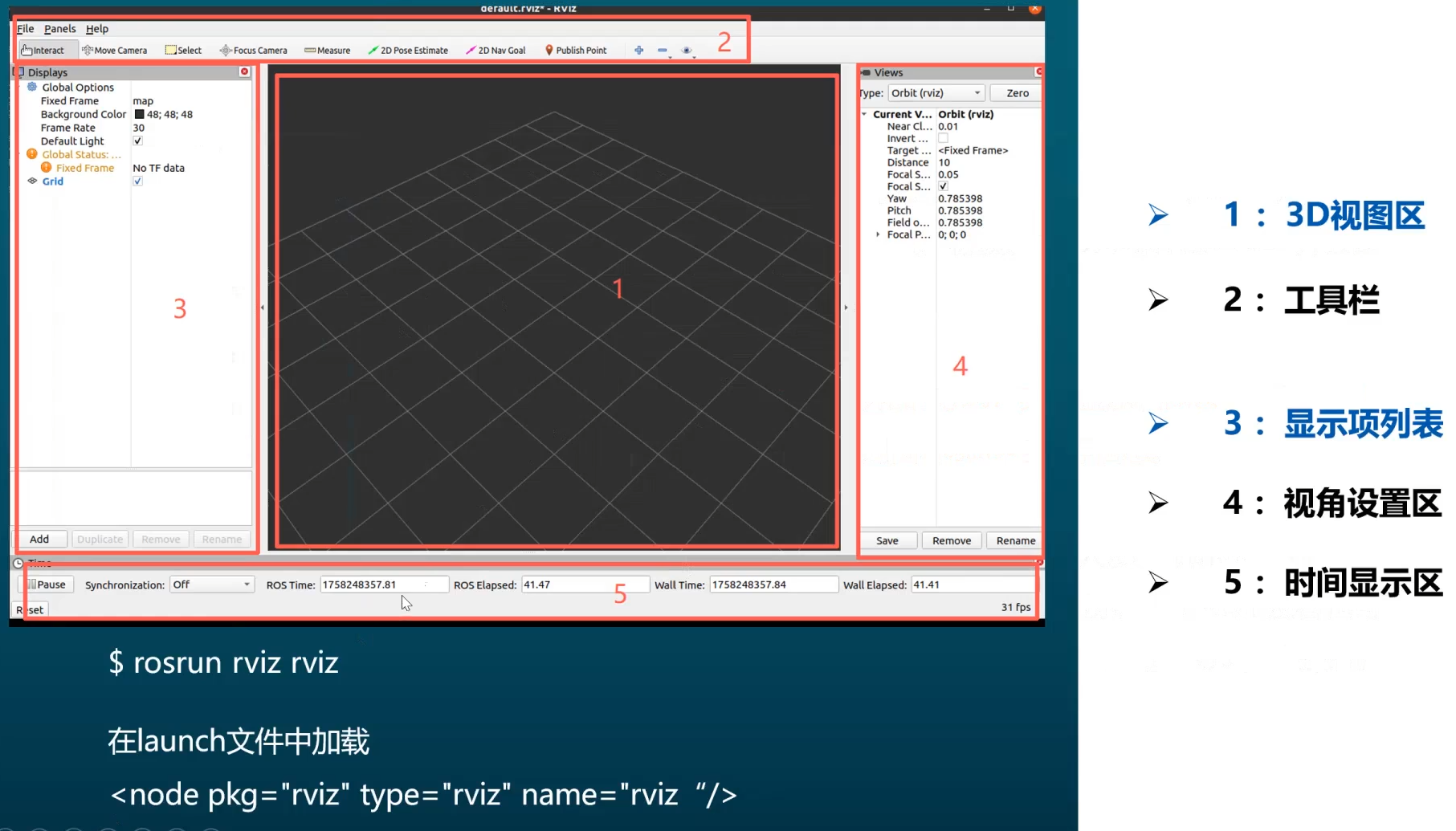
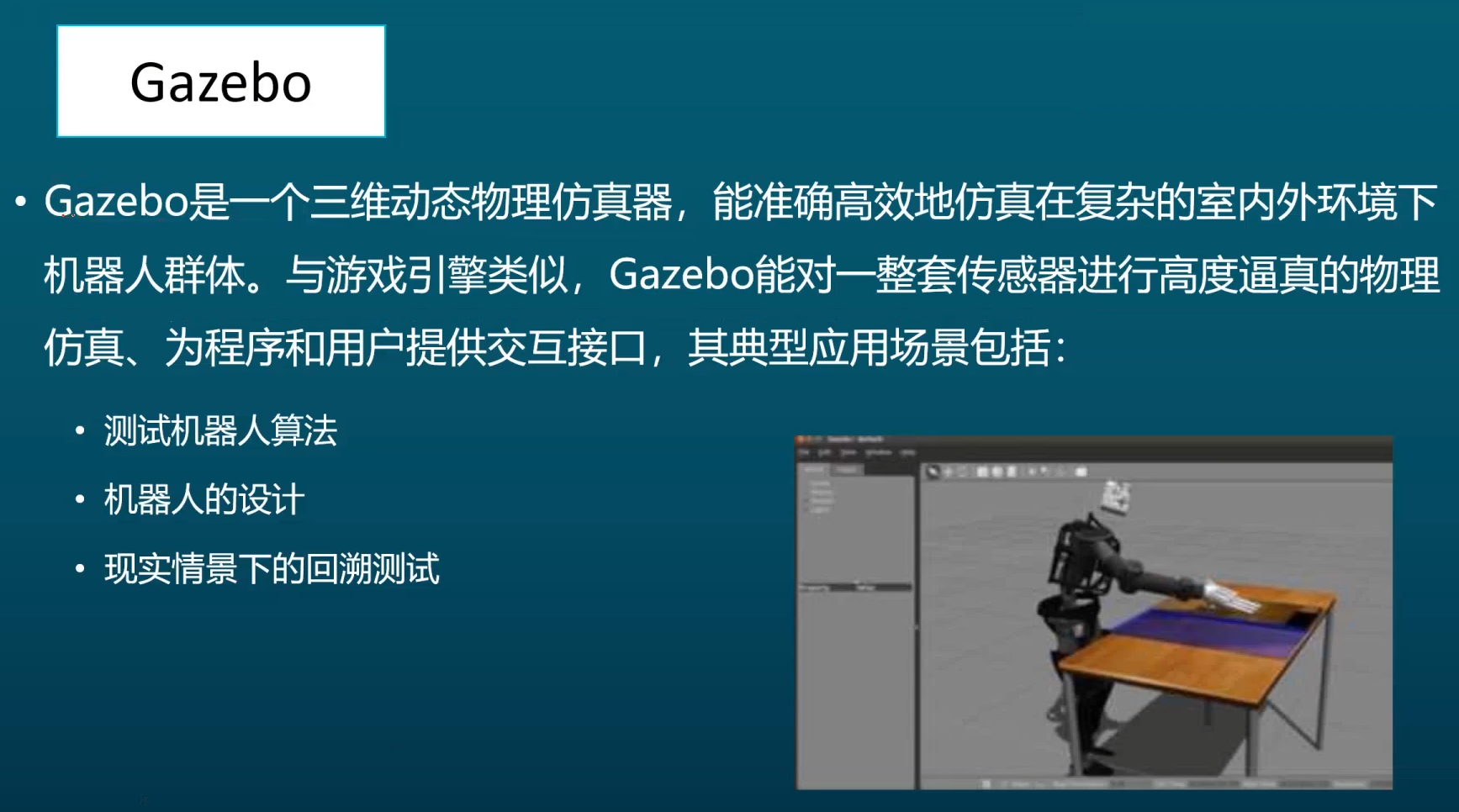
机器人仿真建模
操作文档
http://www.autolabor.com.cn/book/ROSTutorials/di-6-zhang-ji-qi-ren-xi-tong-fang-zhen/62-fang-zhen-urdf-ji-cheng-rviz.html
bash
cd catkin_ws/src
catkin_create_pkg ceshi3 std_msgs roscpp rospy urdf xacro
cd ceshi3
makdir urdf
cd urdf
touch box.urdf文件中粘贴如下代码
xml
<robot name="mycar">
<link name="base_link">
<visual>
<geometry>
<box size="0.5 0.2 0.1" />
</geometry>
</visual>
</link>
</robot>继续执行如下命令
bash
cd ..
mkdir launch
cd launch
touch box.launchlaunch 文件中粘贴如下代码
把包名,urdf 文件的路径替换成自己的
xml
<launch>
<!-- 设置参数 -->
<param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" />
</launch>继续执行如下命令
roslaunch 底层会自动启动 roscore
bash
roslaunch ceshi3 box.launch